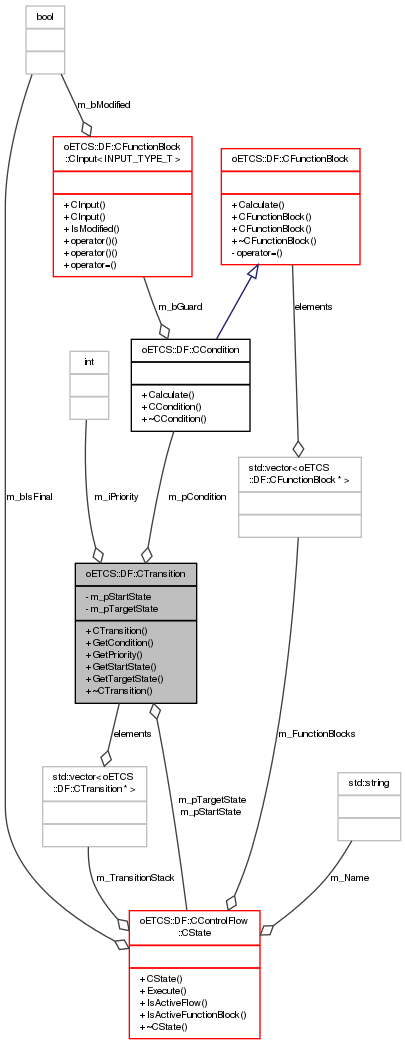
transition class for control flow states More...
#include <Transition.h>
Public Member Functions | |
| CTransition (oETCS::DF::CEVCStateMachine::CEVCState *const pParent, oETCS::DF::CCondition *const pCondition, oETCS::DF::CControlFlow::CState *const pStartState, oETCS::DF::CControlFlow::CState *const pTargetState, const unsigned int &iPriority=0) throw () | |
| general constructor | |
| oETCS::DF::CCondition *const | GetCondition () const throw () |
| gets the pointer to the related condition | |
| unsigned int | GetPriority () const throw () |
| gets the nurmerial priority | |
| oETCS::DF::CControlFlow::CState *const | GetStartState () const throw () |
| gets the pointer to the related start state | |
| oETCS::DF::CControlFlow::CState *const | GetTargetState () const throw () |
| gets the pointer to the related target state | |
| virtual | ~CTransition () throw () |
| destructor | |
Private Attributes | |
| const int | m_iPriority |
| numerical priority of a transition | |
| oETCS::DF::CCondition *const | m_pCondition |
| pointer to the related condition object | |
| oETCS::DF::CControlFlow::CState * | m_pStartState |
| pointer to the starting state of the transition | |
| oETCS::DF::CControlFlow::CState *const | m_pTargetState |
| pointer to the target state of the transition | |
Detailed Description
transition class for control flow states
Definition at line 48 of file Transition.h.
Constructor & Destructor Documentation
|
explicit |
general constructor
Parameterises the control flow state transition with all constant members.
- Parameters
-
[in] pParent pointer to the parent EVC state object [in] pConditon pointer to the related condition object [in] pTargetState pointer to the startEVC state object of the transtion [in] pTargetState pointer to the target EVC state object of the transtion [in] iPriority numerical priority of the transition
Definition at line 36 of file Transition.cpp.
|
virtual |
destructor
Definition at line 52 of file Transition.cpp.
Member Function Documentation
| oETCS::DF::CCondition *const oETCS::DF::CTransition::GetCondition | ( | ) | const throw () |
gets the pointer to the related condition
- Returns
- pointer to the related condition object
Definition at line 63 of file Transition.cpp.
References m_pCondition.
| unsigned int oETCS::DF::CTransition::GetPriority | ( | ) | const throw () |
gets the nurmerial priority
- Returns
- the numerical priority
Definition at line 99 of file Transition.cpp.
References m_iPriority.
| oETCS::DF::CControlFlow::CState *const oETCS::DF::CTransition::GetStartState | ( | ) | const throw () |
gets the pointer to the related start state
- Returns
- pointer to the related start state object
Definition at line 75 of file Transition.cpp.
References m_pStartState.
| oETCS::DF::CControlFlow::CState *const oETCS::DF::CTransition::GetTargetState | ( | ) | const throw () |
gets the pointer to the related target state
- Returns
- pointer to the related target state object
Definition at line 87 of file Transition.cpp.
References m_pTargetState.
Member Data Documentation
|
private |
numerical priority of a transition
Definition at line 135 of file Transition.h.
Referenced by GetPriority().
|
private |
pointer to the related condition object
Definition at line 114 of file Transition.h.
Referenced by GetCondition().
|
private |
pointer to the starting state of the transition
Definition at line 121 of file Transition.h.
Referenced by GetStartState().
|
private |
pointer to the target state of the transition
Definition at line 128 of file Transition.h.
Referenced by GetTargetState().
The documentation for this class was generated from the following files: