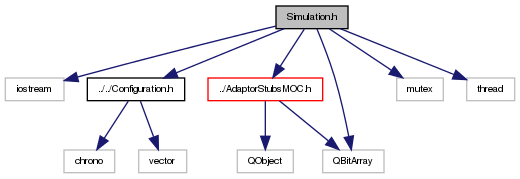
#include <iostream>#include "../../Configuration.h"#include "../AdaptorStubsMOC.h"#include <mutex>#include <thread>#include <QBitArray>
Include dependency graph for Simulation.h:
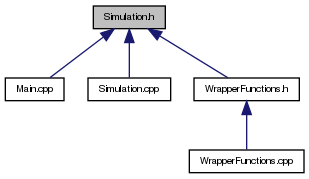
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | oETCS::DF::PS::SIM::CBaliseDeviceIn |
| simulative class for a balise in system More... | |
| class | oETCS::DF::PS::SIM::CBaliseDeviceOut |
| simulative class for a balise out system More... | |
| class | oETCS::DF::PS::SIM::CEmergencyBrake |
| simulative brake system class for a service brake More... | |
| class | oETCS::DF::PS::SIM::COdometer |
| simulative odometer class More... | |
| class | oETCS::DF::PS::SIM::CServiceBrake |
| simulative brake system class for a service brake More... | |
Namespaces | |
| namespace | oETCS |
| GOPPRR XML to syntax tree transformer. | |
| namespace | oETCS::DF |
| namespace | oETCS::DF::PS |
| namespace | oETCS::DF::PS::SIM |