simulative brake system class for a service brake More...
#include <Simulation.h>
Signals | |
| void | Error (const ::QString &ErrorMessage) |
| signal for sending an error | |
Public Member Functions | |
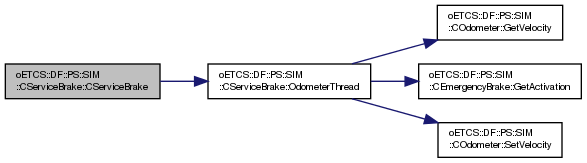
| CServiceBrake (::oETCS::DF::PS::SIM::COdometer *const pOdometer,::oETCS::DF::PS::SIM::CEmergencyBrake *const pEmergencyBrake=nullptr, const double &dIntensity=0.0, const double &dMass=10000, const double &dAdhesion=1.0) throw () | |
| general constructor | |
| virtual double | GetIntensity () |
| gets the activation intensity | |
| void | SetAdhesion (const double &dAdhesion) throw () |
| sets the virtual adhesion | |
| virtual void | SetIntensity (const double &dIntensity) |
| sets the activation intensity | |
| void | SetMass (const double &dMass) throw () |
| sets the virtual mass | |
| virtual | ~CServiceBrake () throw () |
| destructor | |
Private Member Functions | |
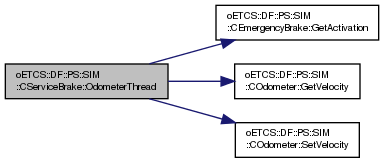
| void | OdometerThread () throw () |
| thread for setting the velocity depending on the brake intensity | |
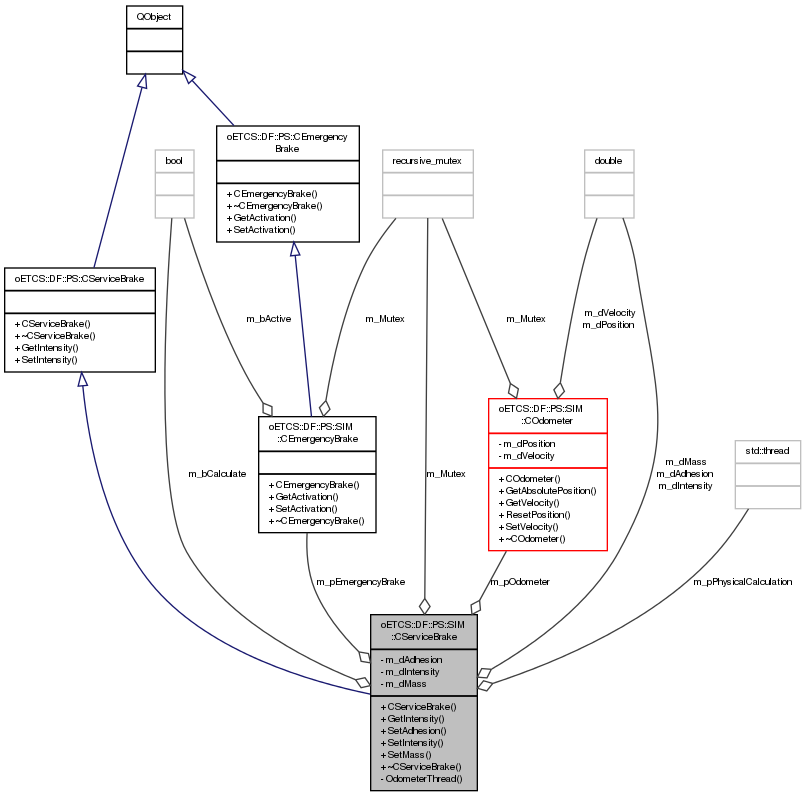
Private Attributes | |
| bool | m_bCalculate |
| flag for the execution of the m_pPhysicalCalculation thread | |
| double | m_dAdhesion |
| adhesion factor {0...1) of the train used for braking curve calculation | |
| double | m_dIntensity |
| intesity of the applied service brake in [%] | |
| double | m_dMass |
| virtual mass in [kg] of the train used for braking curve calculation | |
| ::std::recursive_mutex | m_Mutex |
| muteable exclusion for internal states | |
| ::oETCS::DF::PS::SIM::CEmergencyBrake *const | m_pEmergencyBrake |
| optional pointer to a emegency brake taken into account for brake curve calculation | |
| ::oETCS::DF::PS::SIM::COdometer *const | m_pOdometer |
| pointer to the odometer in which the velocity is modified | |
| ::std::thread * | m_pPhysicalCalculation |
| pointer to the thread object for the physical model calculation manipulating m_pOdometer | |
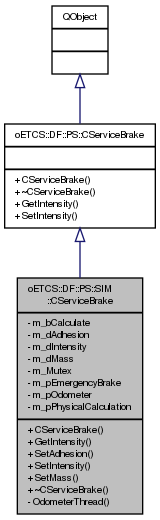
Detailed Description
simulative brake system class for a service brake
Definition at line 155 of file Simulation.h.
Constructor & Destructor Documentation
|
explicit |
general constructor
- Parameters
-
[in] pOdometer pointer to the odometer device to be manipulated [in] pEmergencyBrake optional pointer to a emergency brake instance [in] dIntensity optional initial brake intensity in [%] [in] dMass optional initial train mass [kg] in[ dAdsesion: optional initial adhesion factor (0...1)
Definition at line 175 of file Simulation.cpp.
References m_pOdometer, and OdometerThread().
|
virtual |
destructor
Reimplemented from oETCS::DF::PS::CServiceBrake.
Definition at line 216 of file Simulation.cpp.
References m_bCalculate, and m_pPhysicalCalculation.
Member Function Documentation
|
signalinherited |
signal for sending an error
This signal should be emitted in the case that an error in the HW ocurres.
- Parameters
-
[in] ErrorMessage textual description of the error
Definition at line 958 of file PlatformSpecificClientsMOC.cpp.
|
virtual |
gets the activation intensity
- Returns
- activation intensity of the service brake in [%]
Reimplemented from oETCS::DF::PS::CServiceBrake.
Definition at line 241 of file Simulation.cpp.
References m_dIntensity, and m_Mutex.
Referenced by GetServiceIntensity().

|
private |
thread for setting the velocity depending on the brake intensity
Definition at line 365 of file Simulation.cpp.
References __DATA_FLOW_SAMPLE_TIME__, oETCS::DF::PS::SIM::CEmergencyBrake::GetActivation(), oETCS::DF::PS::SIM::COdometer::GetVelocity(), m_bCalculate, m_dAdhesion, m_dIntensity, m_dMass, m_Mutex, m_pEmergencyBrake, m_pOdometer, and oETCS::DF::PS::SIM::COdometer::SetVelocity().
Referenced by CServiceBrake().

| void oETCS::DF::PS::SIM::CServiceBrake::SetAdhesion | ( | const double & | dAdhesion | ) | throw () |
sets the virtual adhesion
- Parameters
-
[in] dAdhesion new virtual adhesion factor (0...1)
Definition at line 330 of file Simulation.cpp.
Referenced by SetAdhesion().

|
virtual |
sets the activation intensity
- Parameters
-
[in] bIntensity the new activation intensity in [%]
Reimplemented from oETCS::DF::PS::CServiceBrake.
Definition at line 266 of file Simulation.cpp.
References m_dIntensity, and m_Mutex.
Referenced by SetServiceIntensity().

| void oETCS::DF::PS::SIM::CServiceBrake::SetMass | ( | const double & | dMass | ) | throw () |
sets the virtual mass
- Parameters
-
[in] dMass new mass in [kg]
Definition at line 301 of file Simulation.cpp.
Referenced by SetMass().

Member Data Documentation
|
private |
flag for the execution of the m_pPhysicalCalculation thread
Definition at line 227 of file Simulation.h.
Referenced by OdometerThread(), and ~CServiceBrake().
|
private |
adhesion factor {0...1) of the train used for braking curve calculation
Definition at line 248 of file Simulation.h.
Referenced by OdometerThread().
|
private |
intesity of the applied service brake in [%]
Definition at line 234 of file Simulation.h.
Referenced by GetIntensity(), OdometerThread(), and SetIntensity().
|
private |
virtual mass in [kg] of the train used for braking curve calculation
Definition at line 241 of file Simulation.h.
Referenced by OdometerThread().
|
private |
muteable exclusion for internal states
Definition at line 276 of file Simulation.h.
Referenced by GetIntensity(), OdometerThread(), and SetIntensity().
|
private |
optional pointer to a emegency brake taken into account for brake curve calculation
Definition at line 262 of file Simulation.h.
Referenced by OdometerThread().
|
private |
pointer to the odometer in which the velocity is modified
Definition at line 255 of file Simulation.h.
Referenced by OdometerThread().
|
private |
pointer to the thread object for the physical model calculation manipulating m_pOdometer
Definition at line 269 of file Simulation.h.
Referenced by ~CServiceBrake().
The documentation for this class was generated from the following files: